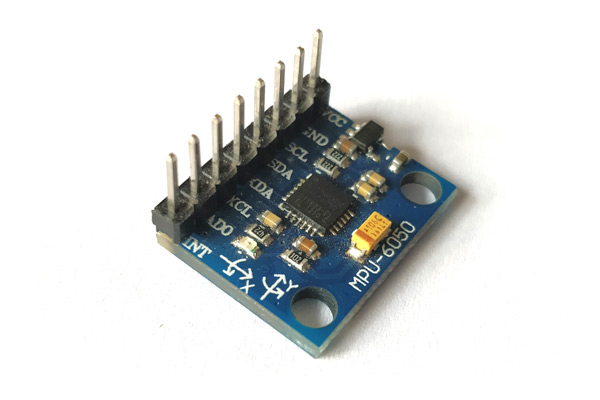
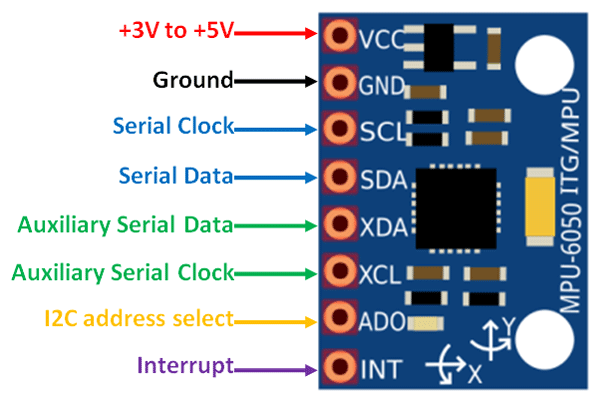
캔위성이 낙하하거나 하늘에서 운동하는 동안 고도는 너무 적은 정보이다. 위성의 기울어진 각도 또는 회전상태 가속도 등 자세정보를 파악하는게 중요하다. 이를 위해 사용되는 센서는 IMU(Inertial Measurement Unit, 관성측정장치)이다. 이번 포스팅에서는 가장 흔하게 쓰이는 MPU6050 센서의 동작 원리와 데이터 처리 방법을 다뤄보고자 한다. 아래는 MPU6050 센서의 사진과 각 핀에 대한 설명이다. 여기서는 VCC, GND, SCL, SDA 핀만 다루도록 하겠다.
1. MPU6050 개요
MPU6050은 MEMS(Micro-Electro-Mechanical Systems) 기술을 기반으로 제작되었습니다. 칩 내부에는 눈에 보이지 않을 정도로 작은 미세 기계 구조물이 들어있어 물리적인 움직임을 전기적 신호로 변환합니다. 아래는 MPU6050에 있는 가속도계의 물리적 작동원리에 대해 설명한 영상입니다.
1-1. 3축 가속도계
가속도계의 측정범위의 g는 중력가속도 를 의미한다. 측정된 RawData(원시측정값)을 감도계수로 나눠 각 x,y,z축에 작용하는 관성 가속도를 구할 수 있습니다.
| 측정 범위 | 감도 계수(LSB/g) | 해상도(mg/LSB) | 비고 |
|---|---|---|---|
| ±2g | 16384 | 0.061 | 가장 정밀한 측정 가능 |
| ±4g | 8192 | 0.122 | 중간 정밀도 |
| ±8g | 4096 | 0.244 | 일반적인 드론/위성 권장 |
| ±16g | 2048 | 0.488 | 큰 충격이 발생하는 환경 |
 [사진 출처] (https://lastminuteengineers.com)
[사진 출처] (https://lastminuteengineers.com)
1-2. 3축 자이로센서
| 측정 범위 | 감도 계수(LSB/deg/s) | 해상도(deg/s/LSB) | 비고 |
|---|---|---|---|
| ±250deg/s | 131 | 0.0076 | 정적인 자세 제어 |
| ±500deg/s | 65.5 | 0.0152 | 일반적인 회전 측정 |
| ±1000deg/s | 32.8 | 0.0305 | 고속 회전 환경 |
| ±2000deg/s | 16.4 | 0.061 | 급격한 기동 환경 |
 [사진 출처] (https://lastminuteengineers.com)
[사진 출처] (https://lastminuteengineers.com)
범위와 정밀도의 상관관계MPU6050은 16비트라는 한정된 자원(단계)을 사용합니다. 측정 범위를 좁게 잡을수록() 한 단계(1 LSB)가 나타내는 물리량이 작아지므로(0.061mg), 감도 계수가 커지고 정밀도는 높아집니다. 반대로 범위를 넓게 잡으면 더 큰 충격을 측정할 수 있지만, 세밀한 변화를 감지하는 능력은 떨어지게 됩니다.
2. 물리적 작동 원리: MEMS 기술
2-1. 가속도계: 가변 정전용량 방식
가속도계 내부에 미세한 스프링에 매달린 질량체가 존재합니다. 외부 가속도가 가해지면 관성에 의해 질량체가 이동하게 되고, 이때 고정된 전극과 거리가 변하게 됩니다. 이때 축전기의 정전용량(Capacitance) 변화를 측정하여 가속도를 계산합니다.
 [사진 출처] (https://lastminuteengineers.com)
[사진 출처] (https://lastminuteengineers.com)
2-2. 자이로스코프: 코리올리 힘
회전하는 물체 위에서 운동하는 입자는 운동 방향에 수직인 힘을 받는데 이 힘을 코리올리 힘이라고 합니다. MEMS 자이로 내부의 미세 구조물이 진동하고 있을 때 외부 회전이 발생하면, 코리올리 힘에 의해 진동축이 변하게 되고 이때 변한 각 질량체 들의 거리변화를 측정하여 각속도를 계산합니다.
아래 그림과 같이 네 개의 부분으로 구성된 추진 질량체가 있고 이는 특정 주파수로 진동하고 있습니다. 외부 회전이 발생하면 코리올리 힘에 의해 진동축이 변하게 되고 이때 변한 각 질량체 들의 거리변화를 측정하여 각속도를 계산합니다.
 [사진 출처] (https://lastminuteengineers.com)
[사진 출처] (https://lastminuteengineers.com)
다음은 각 방향(롤, 피치, 요)으로 회전이 발생할때 진동축의 변화를 나타낸 그림입니다.
롤(roll) 방향 회전
 [사진 출처] (https://lastminuteengineers.com)
[사진 출처] (https://lastminuteengineers.com)
피치(pitch) 방향 회전
 [사진 출처] (https://lastminuteengineers.com)
[사진 출처] (https://lastminuteengineers.com)
요(yaw) 방향 회전
 [사진 출처] (https://lastminuteengineers.com)
[사진 출처] (https://lastminuteengineers.com)
3. 오일러 각 계산과 한계
물체가 준정적으로 움직이거나 정적인 상태라면 가속도 센서의 성분만을 이용해 삼각함수로 기울어진 각도를 계산할 수 있습니다. (하지만 이렇게 하면 문제가 생김)
3-1. 가속도계로만 부족한 이유
가속도계는 정적인 상태에서 중력 벡터를 이용해 기울어진 각도를 찾는 것에는 문제가 없지만, 관성에 의한 관성력을 측정해 가속도를 계산하는 센서의 특성상 동적인 상태에서는 중력가속도와 관성에 의한 가속도가 같이 작용하기 때문에 정확한 각도를 측정할 수 없습니다.
센서 특성 요약가속도계(Accelerometer): 저주파 신호에 강함(장기적으로 정확함). 하지만 고주파 노이즈(진동)에 매우 취약함.
자이로스코프(Gyroscope): 고주파 신호에 강함(순간적인 변화에 민감함). 하지만 적분 오차로 인해 시간이 지날수록 값이 흐르는 드리프트(Drift) 현상 발생.
따라서 위와 같은 문제를 해결하기 위해서는 가속도계, 자이로스코프를 같이 상보적으로 이용하는 상보필터 또는 칼만필터, 매드윅필터 등의 알고리즘을 사용하여 정확한 각도를 측정할 수 있습니다. 이 내용은 추후에 따로 포스팅 하도록 하겠습니다.
4. 소프트웨어 구현 및 설정
아래 코드는 가속도계 데이터만을 활용한 기초적인 기울어진 각도 산출 방식입니다. 별도의 필터가 적용되지 않은 코드이므로 동적인 상황에서 정확한 각도를 측정할 수 없습니다!!
#include <Adafruit_MPU6050.h>#include <Adafruit_Sensor.h>#include <Wire.h>
Adafruit_MPU6050 mpu;
void setup() { Serial.begin(115200); if (!mpu.begin()) { Serial.println("MPU6050 연결 실패"); while (1) yield(); }
// --- 측정 범위 설정 --- // 가속도: ±8g (낙하 충격 대비) mpu.setAccelerometerRange(MPU6050_RANGE_8_G); // 자이로: ±500 deg/s (위성 회전 대비) mpu.setGyroRange(MPU6050_RANGE_500_DEG); // DLPF(Digital Low Pass Filter) 설정: 21Hz (진동 노이즈 제거) mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);}void loop() { sensors_event_t a, g, temp; mpu.getEvent(&a, &g, &temp);
// Raw 데이터 출력 및 오일러 각 계산 // Adafruit 라이브러리는 내부적으로 LSB 계수를 나누어 m/s^2 단위로 변환해줍니다. float roll = atan2(a.acceleration.y, a.acceleration.z) * 180 / PI; float pitch = atan2(-a.acceleration.x, sqrt(pow(a.acceleration.y, 2) + pow(a.acceleration.z, 2))) * 180 / PI;
Serial.printf("Roll: %.2f | Pitch: %.2f | Temp: %.1f C\n", roll, pitch, temp.temperature); delay(100);}